Energies, Free Full-Text
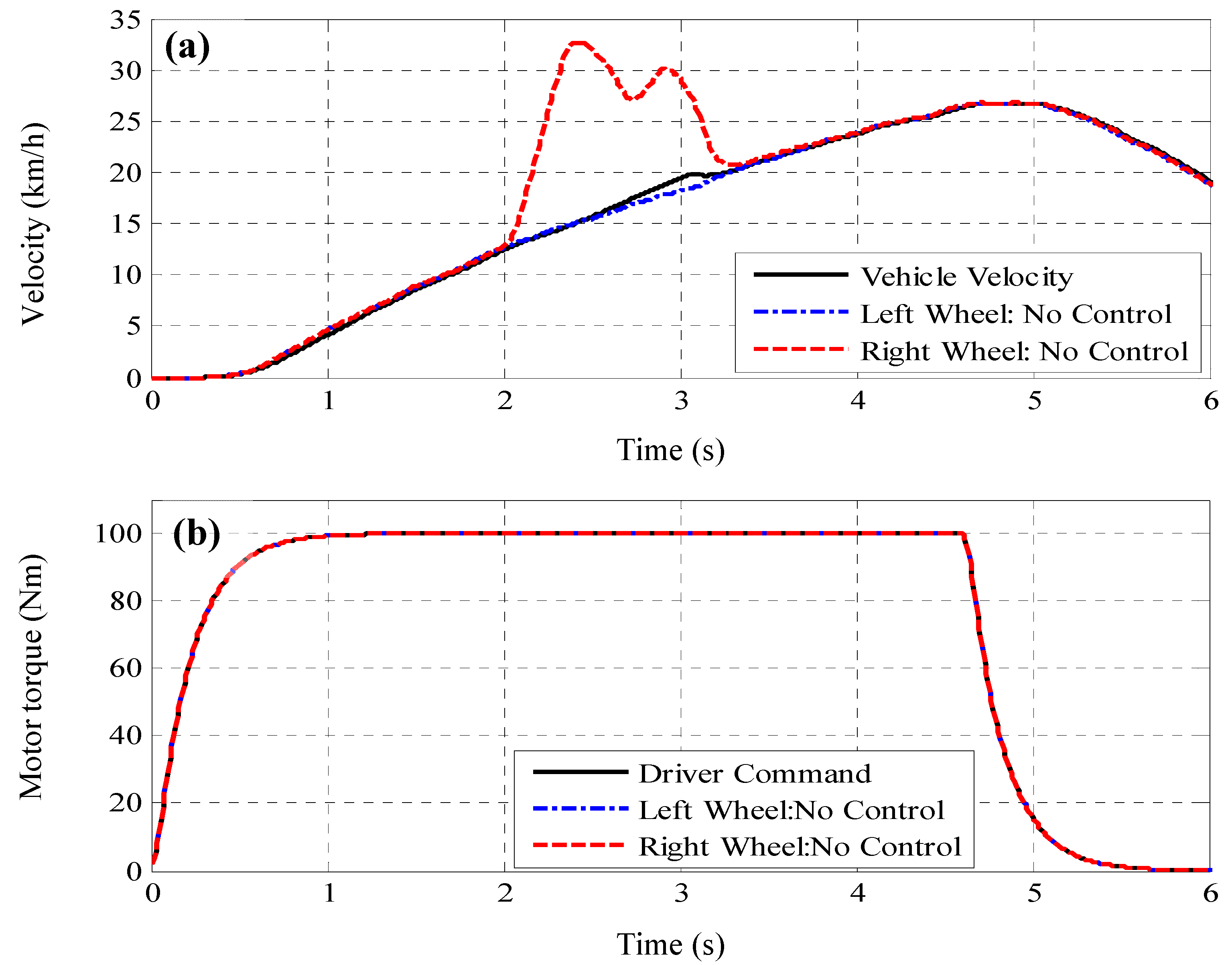
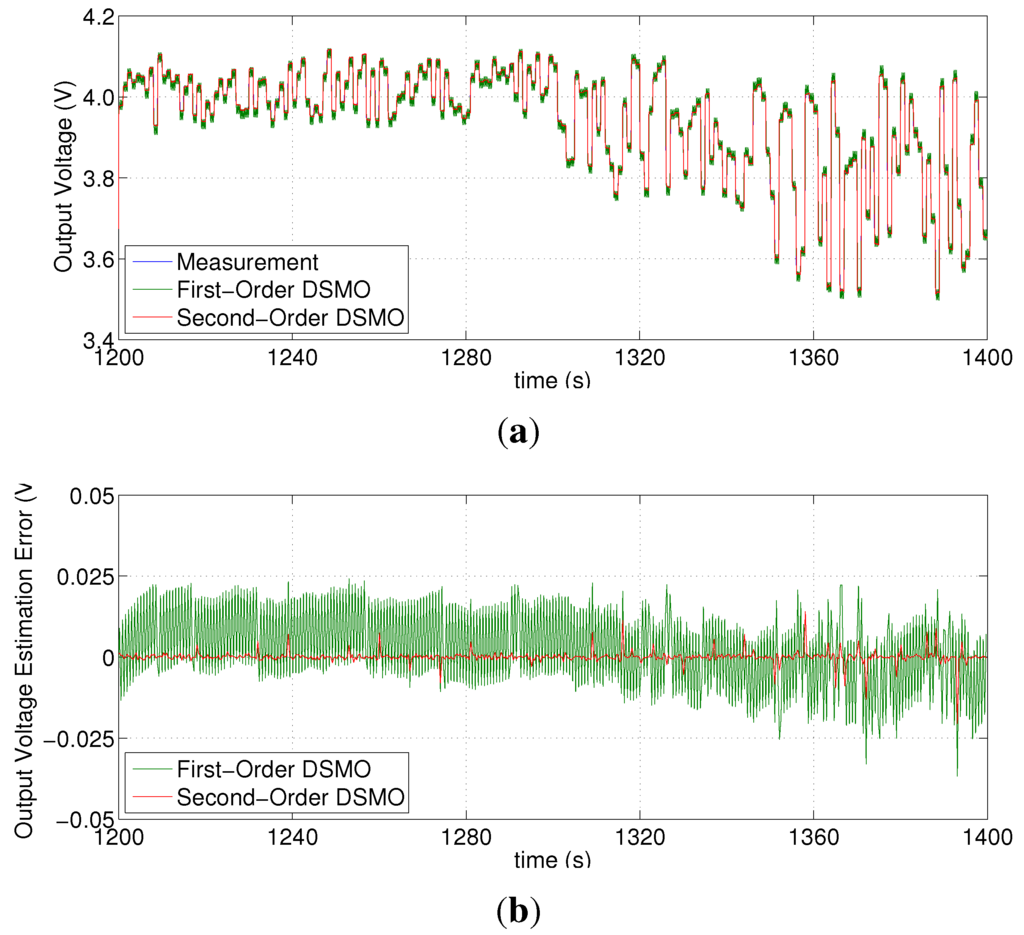
In this paper, a robust wheel slip control system based on a sliding mode controller is proposed for improving traction-ability and reducing energy consumption during sudden acceleration for a personal electric vehicle. Sliding mode control techniques have been employed widely in the development of a robust wheel slip controller of conventional internal combustion engine vehicles due to their application effectiveness in nonlinear systems and robustness against model uncertainties and disturbances. A practical slip control system which takes advantage of the features of electric motors is proposed and an algorithm for vehicle velocity estimation is also introduced. The vehicle velocity estimator was designed based on rotational wheel dynamics, measurable motor torque, and wheel velocity as well as rule-based logic. The simulations and experiments were carried out using both CarSim software and an experimental electric vehicle equipped with in-wheel-motors. Through field tests, traction performance and effectiveness in terms of energy saving were all verified. Comparative experiments with variations of control variables proved the effectiveness and practicality of the proposed control design.

Mho's Law Justifies Free Energy - Text, Vol. 1 of 2: How to generate an endless supply of reactive power by emulating the behavior of spark gaps.: Vinyasi: 9798529742068: : Books

Energies, Free Full-Text, alpha zero campinas

Energies, Free Full-Text, hybrid filter

All Energy Australia Exhibition & Conference

Energy Text Effect Images - Free Download on Freepik

Vitamins for Energy- Vegan Supplements for Energy - Vegetology

Energies, Free Full-Text, ghg emissions
Energy Font Family Download
Energies, Free Full-Text, ghg emissions