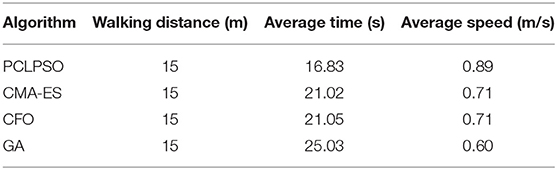
Frontiers Gait Optimization Method for Humanoid Robots Based on

Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Closed-Loop Torque and Kinematic Control of a Hybrid

Applied Sciences, Free Full-Text
Current developments of robotic hip exoskeleton toward sensing

Sensors, Free Full-Text

Advancements in Humanoid Robots: A Comprehensive Review and Future
Applied Sciences, Free Full-Text

Overview of humanoid robot HRP-4 (left). The robot can wear a
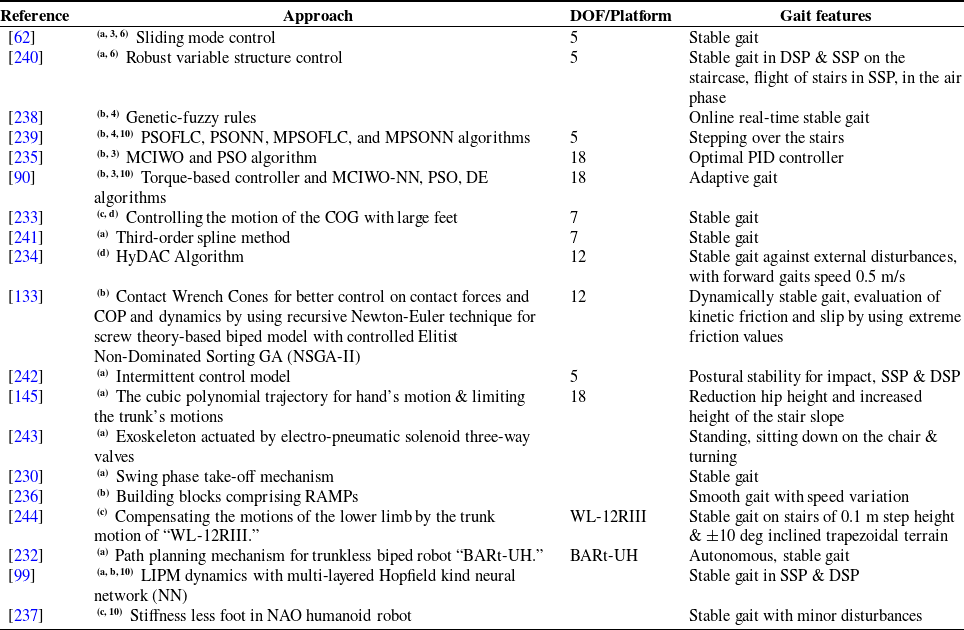
A review on gait generation of the biped robot on various terrains

PDF) Gait Optimization Method for Humanoid Robots Based on

Smart Gait: A Gait Optimization Framework for Hexapod Robots
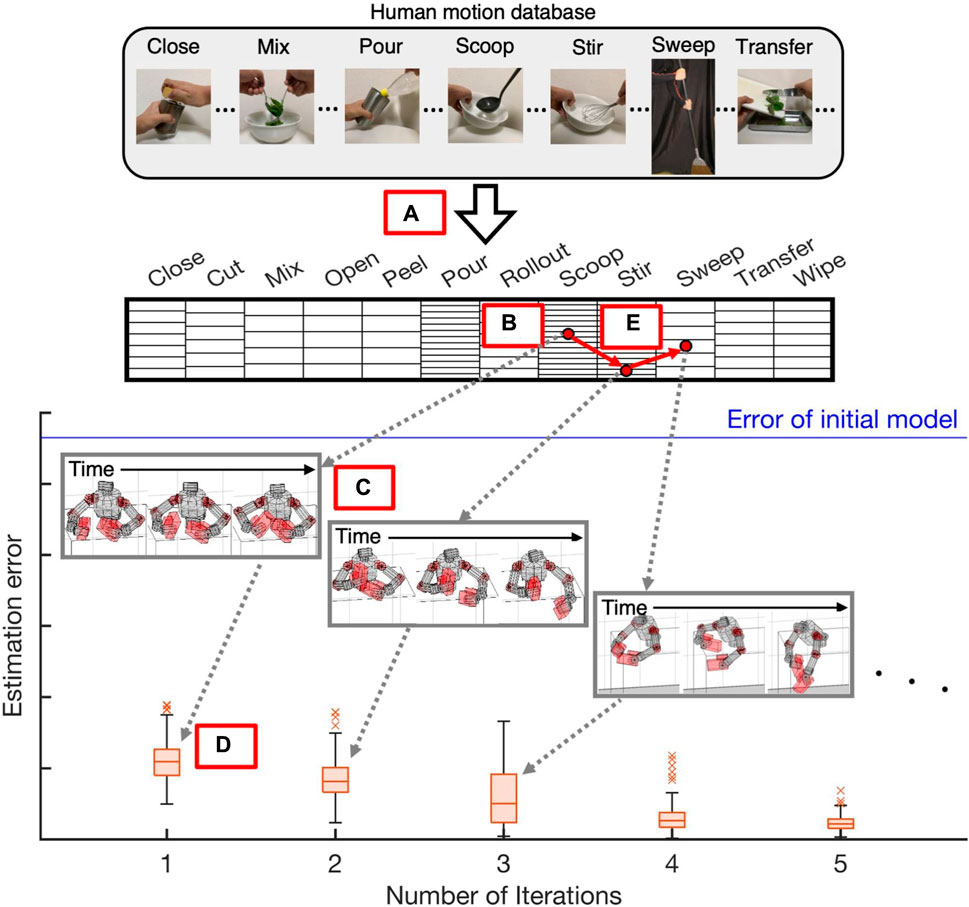
Frontiers Curriculum-based humanoid robot identification using
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on
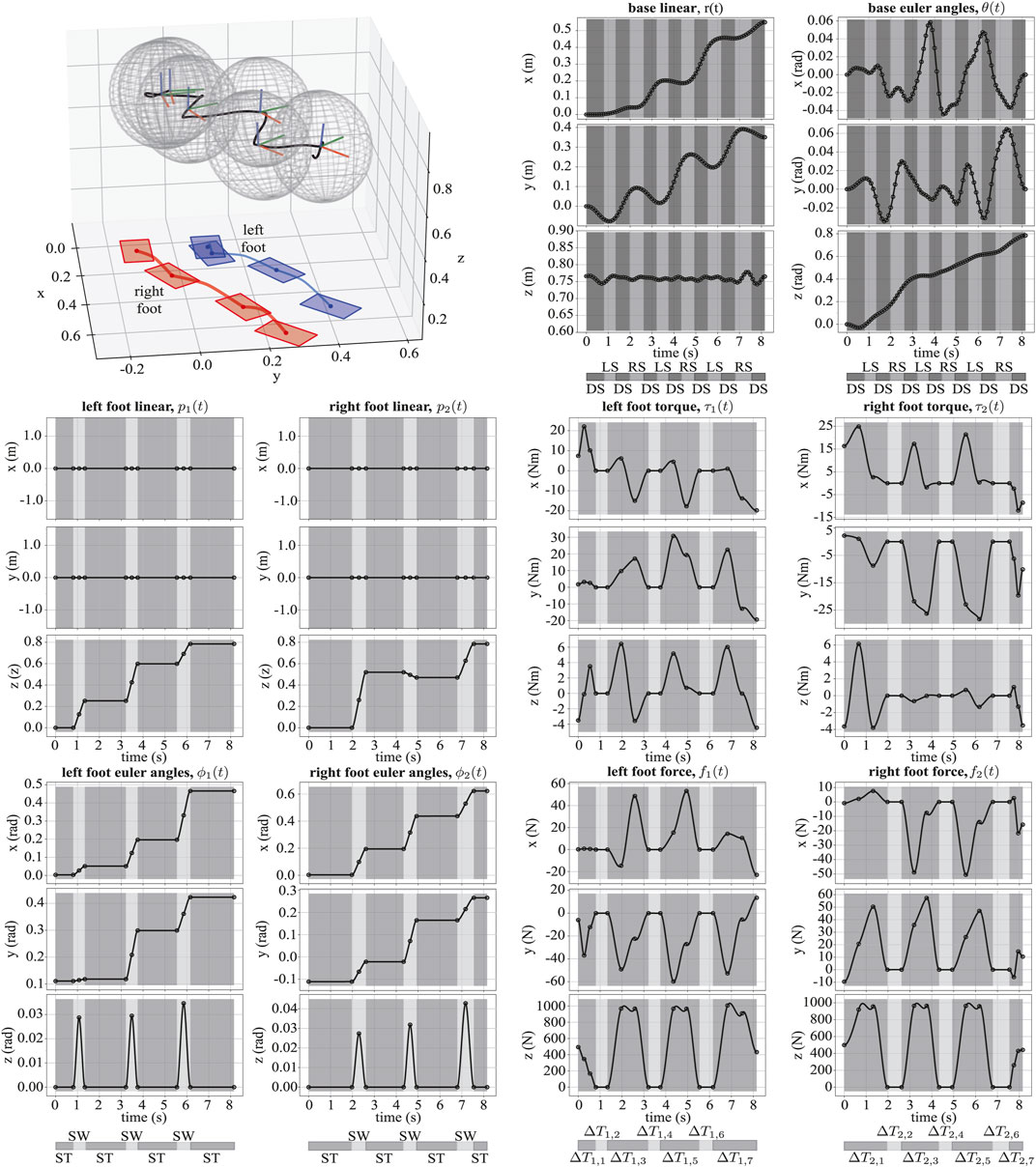
Frontiers Versatile Locomotion Planning and Control for Humanoid