Micromachines, Free Full-Text
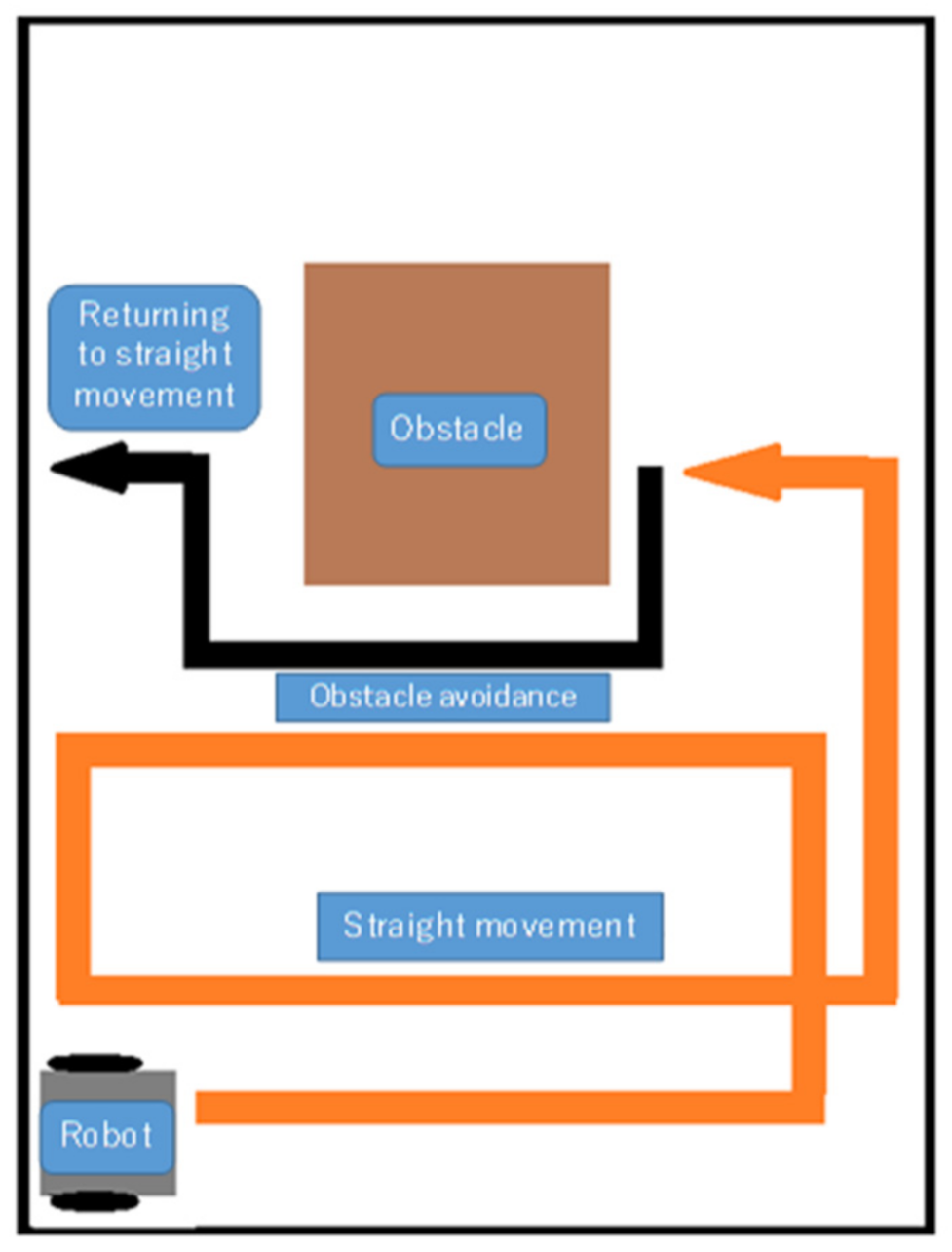
Several robot-related studies have been conducted in recent years; however, studies on the autonomous travel of small mobile robots in small spaces are lacking. In this study, we investigate the development of autonomous travel for small robots that need to travel and cover the entire smooth surface, such as those employed for cleaning tables or solar panels. We consider an obstacle-available surface and target this travel on it by proposing a spiral motion method. To achieve the spiral motion, we focus on developing autonomous avoidance of obstacles, return to original path, and fall prevention when robots traverse a surface. The development of regular travel by a robot without an encoder is an important feature of this study. The traveled distance was measured using the traveling time. We achieved spiral motion by analyzing the data from multiple small sensors installed on the robot by introducing a new attitude-control method, and we ensured that the robot returned to the original spiral path autonomously after avoiding obstacles and without falling over the edge of the surface.

Micro Machines (NES) - The Cutting Room Floor

Micromachines Free Full-Text Ink-Jet Printing Of Micro-Electro
DC/DC Converters: Devices Capable of Converting to Higher or Lower
Forests, Free Full-Text, mdpope 1-3

Micromachines, PDF, Toys

Comparison of the Use of the Halimeter and the Oral Chroma™ in the
Micro Machines, Nintendo

Micromachines, Free Full-Text

Triple beam laser interferometer SP 5000 TR, laser triple

How To Identify Vintage Micro Machines. The Secrets Reveled!
Micro Machines World Series
Micromachines, Free Full-Text

Nano Cellulose Vehicle highlights potential of plants, News, Vehicle

MicroMachines Logo by NeoRame on DeviantArt