Multi-Loop PI Control of a Robotic Arm - MATLAB & Simulink
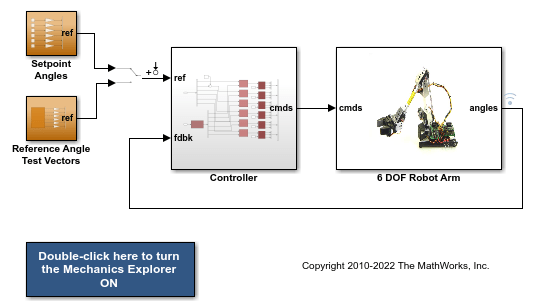
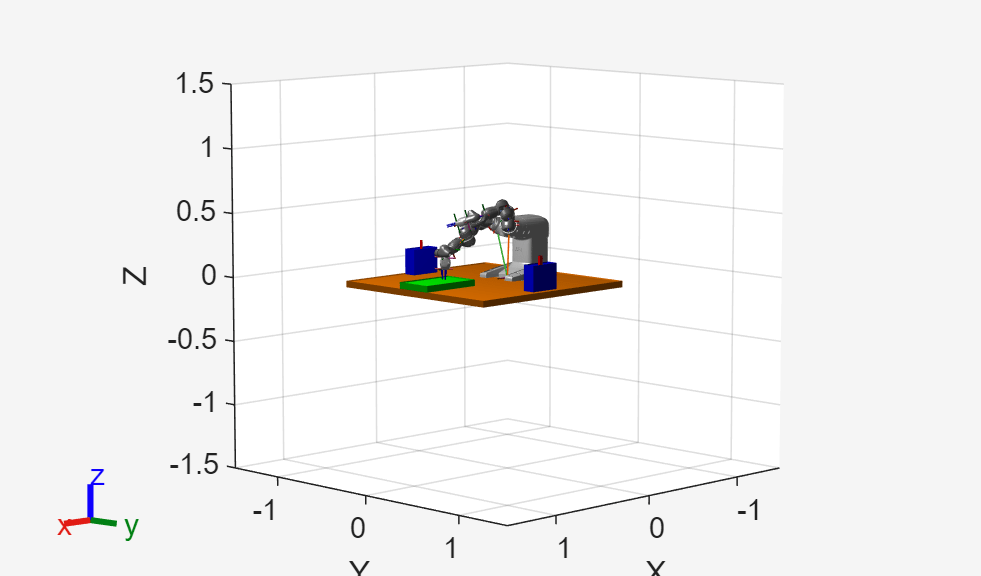
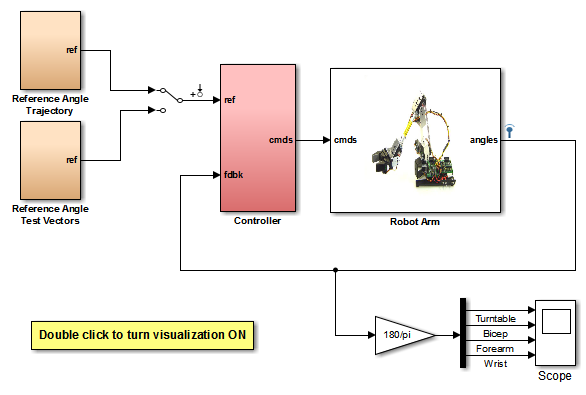
This example shows how to use looptune to tune a multi-loop controller for a 6-DOF robotic arm manipulator.
Use looptune to tune a multi-loop controller for a 6-DOF robotic arm manipulator.
Algorithms, Free Full-Text

What is PID Control? - MATLAB & Simulink

Knowledge, Free Full-Text
Model and Control a Manipulator Arm with Robotics and Simscape
Applied Sciences, Free Full-Text

Proportional–integral–derivative controller - Wikipedia

Energies, Free Full-Text

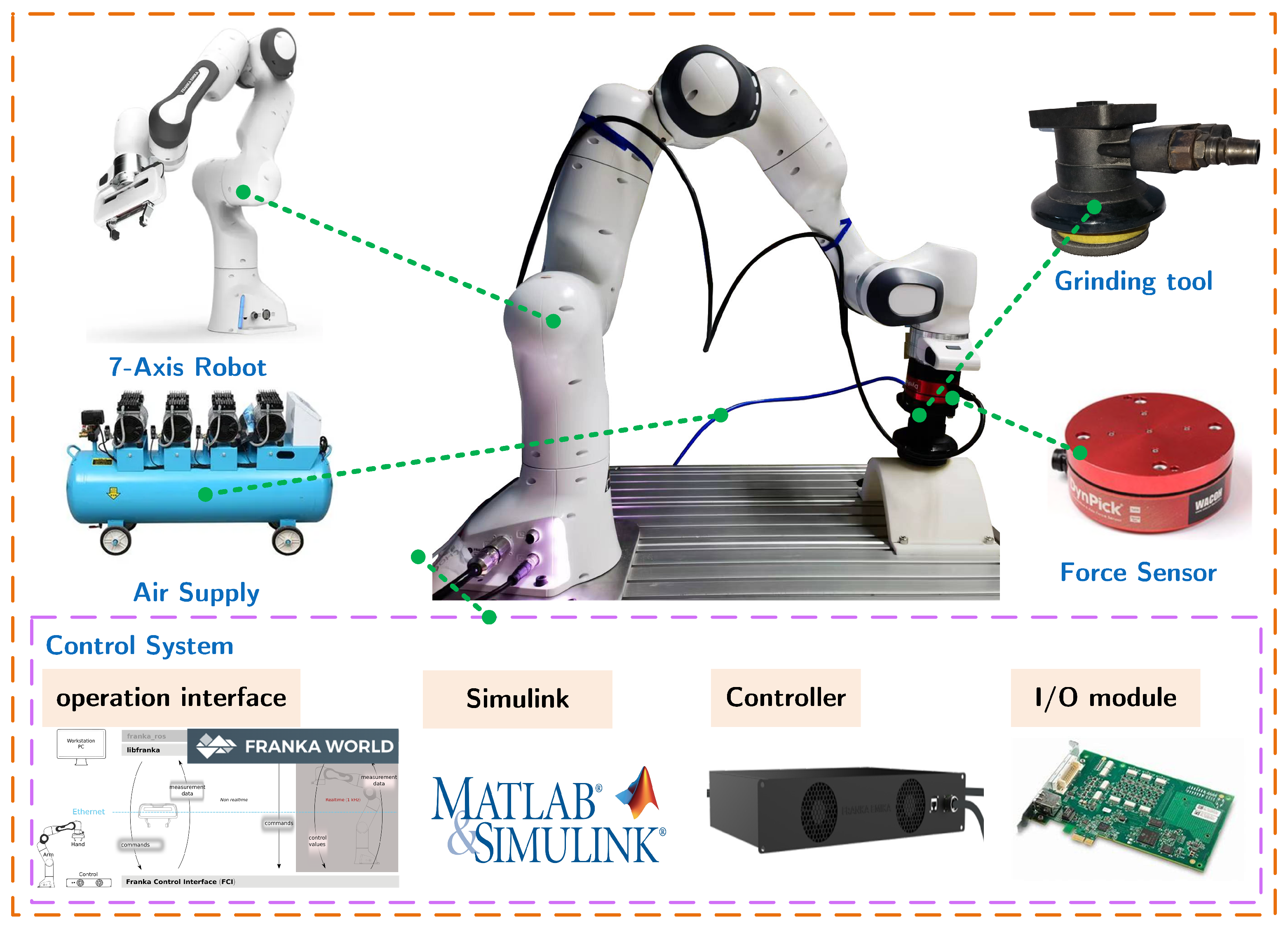
Teaching Robotic Control Concepts with a Robotic Arm, an Arduino

Sensors, Free Full-Text
Multi-Loop PI Control of a Robotic Arm - MATLAB & Simulink
Create a PID control of a Robot arm to use loop-tune

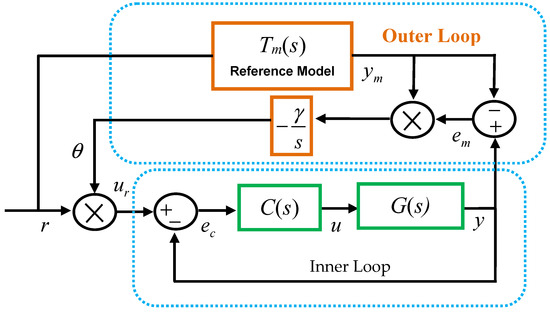
Modeling of PID controlled 3DOF robotic manipulator using Lyapunov
The Simulink model using the proposed control method.

Closed Loop System and Closed-loop Control Systems