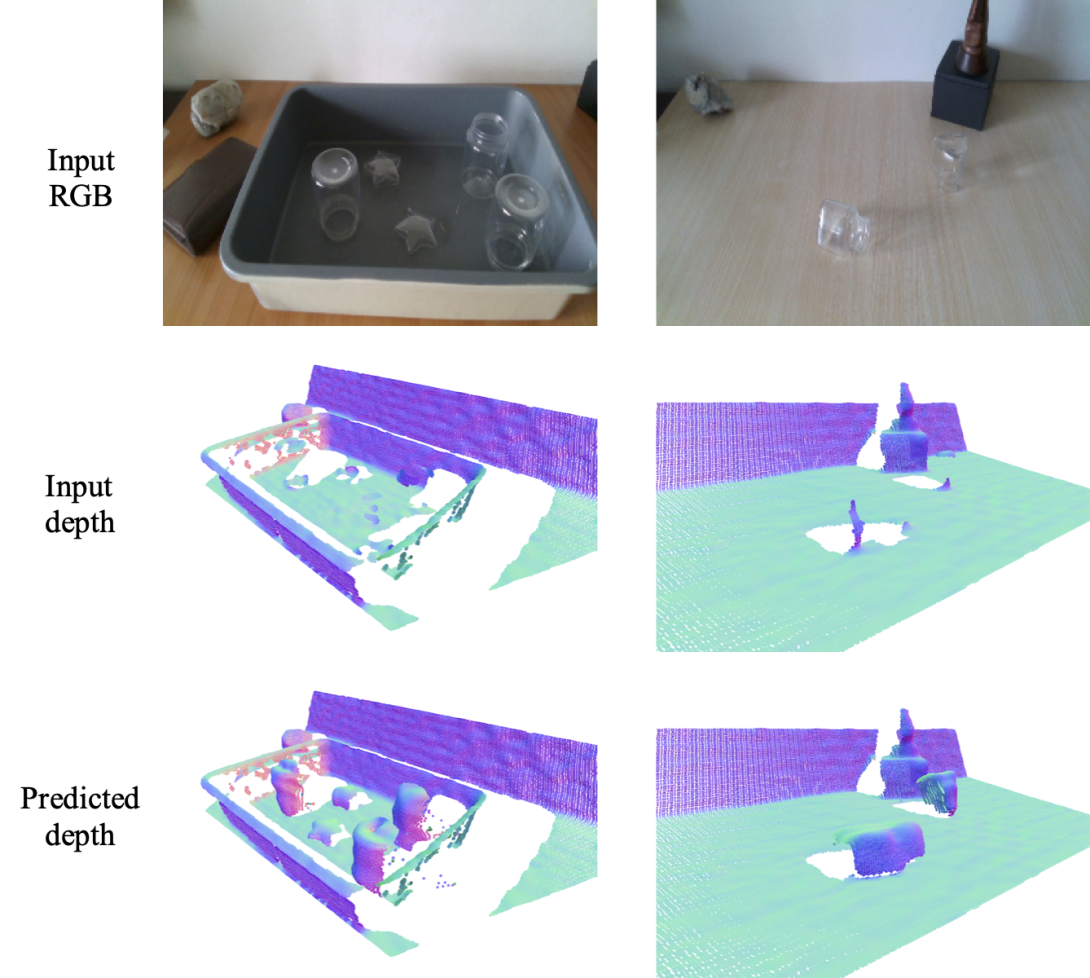
Attack visualization for GR-ConvNet-RGB-D on OCID grasp dataset. The


PDF) Shortcut-enhanced Multimodal Backdoor Attack in Vision-guided Robot Grasping

A walk in the black-box: 3D visualization of large neural networks in virtual reality

PDF] RGB-D Object Recognition and Grasp Detection Using Hierarchical Cascaded Forests
GitHub - SteveHao74/shahao_GR-ConvNet

Failed attack results in high-clutter scenarios, the first and second

Experimental setup: operator (left) & robots (right)

Autonomous Vehicles Enabled by the Integration of IoT, Edge Intelligence, 5G, and Blockchain. - Abstract - Europe PMC
A walk in the black-box: 3D visualization of large neural networks in virtual reality

Attack visualization for GR-ConvNet-RGB-D on OCID grasp dataset. The

2022 roadmap on neuromorphic computing and engineering - IOPscience

Review Paper: Real-Time Grasp Detection Using Convolutional Neural Networks, by Isaac Kargar, Aidrivers Ltd.
RGB-D Local Implicit Function for Depth Completion of Transparent Objects

Failed attack results in high-clutter scenarios, the first and second
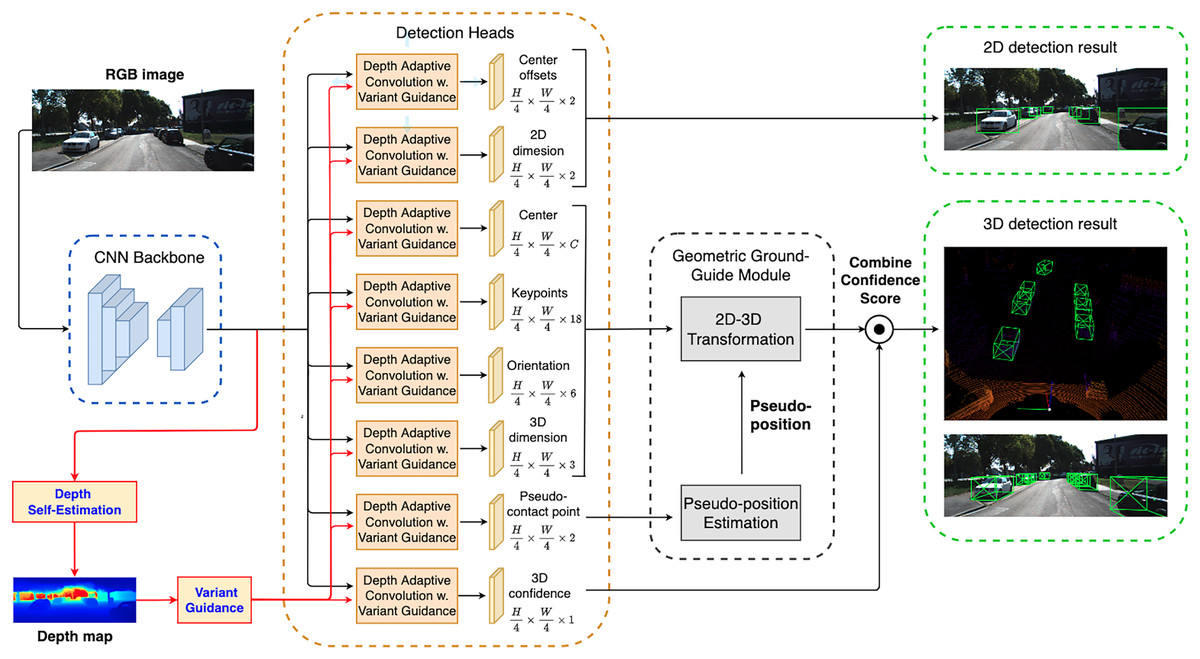
eGAC3D: enhancing depth adaptive convolution and depth estimation for monocular 3D object pose detection [PeerJ]